Setup #
Ledningerne for RFID modulet:
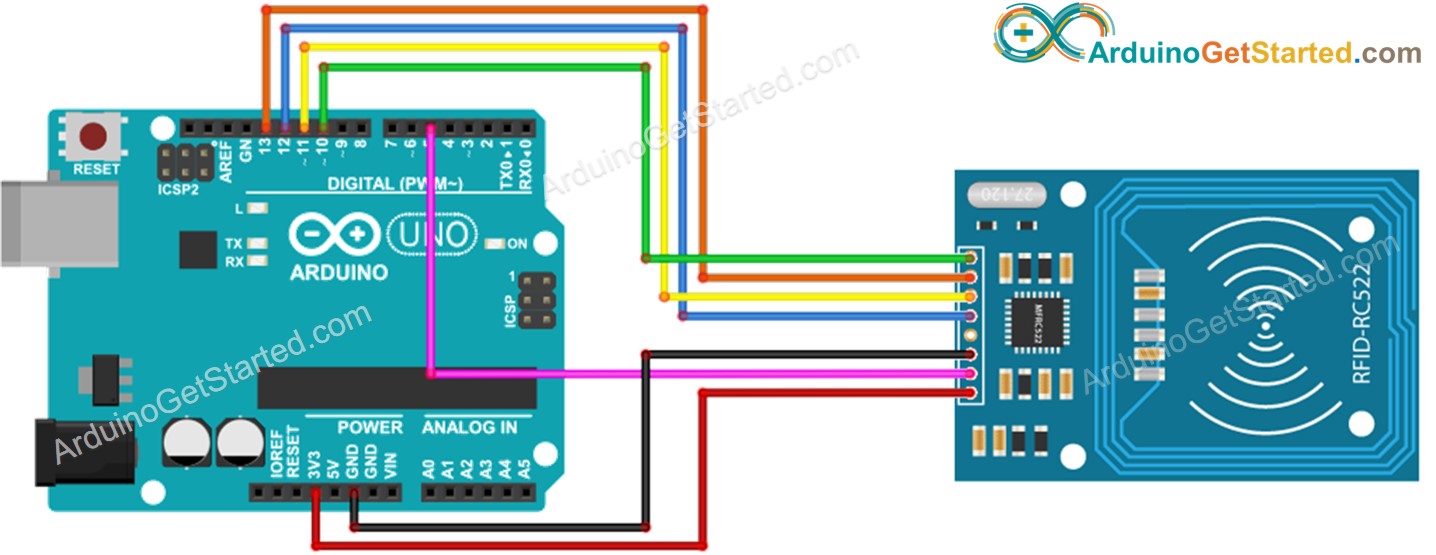
Og en tabel over forbindelserne:

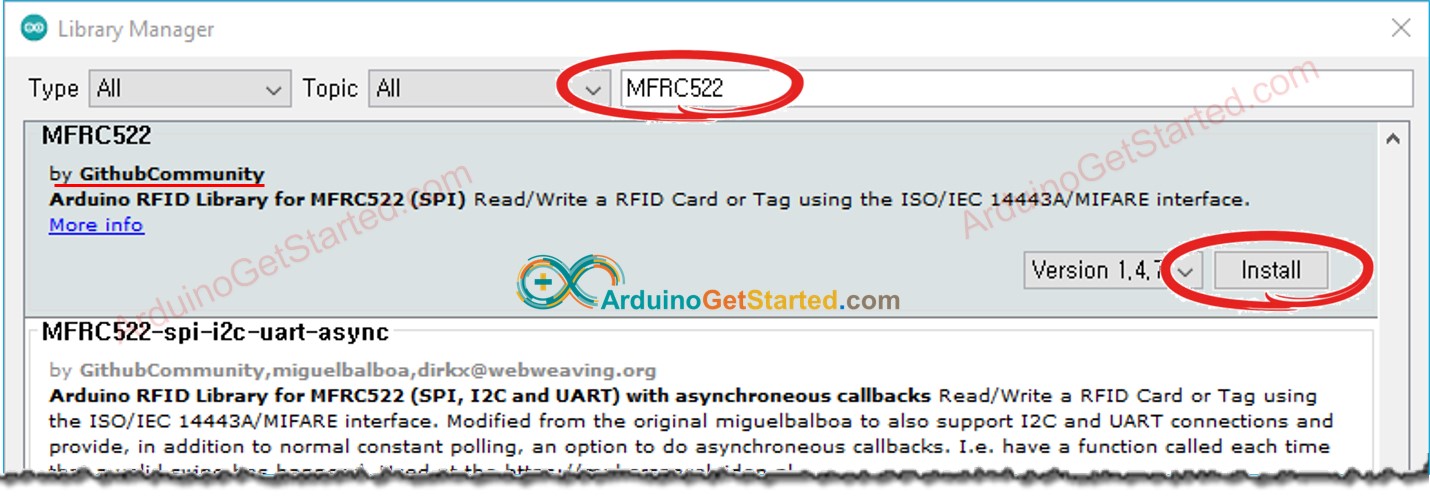
Bibloteket #
Installer biblioteket fra Arduino IDE:
Kode eksempler: #
#include <SPI.h>
#include <MFRC522.h>
#define SS_PIN 10
#define RST_PIN 5
MFRC522 rfid(SS_PIN, RST_PIN);
void setup() {
Serial.begin(9600);
SPI.begin(); // init SPI bus
rfid.PCD_Init(); // init MFRC522
Serial.println("Tap RFID/NFC Tag on reader");
}
void loop() {
if (rfid.PICC_IsNewCardPresent()) { // new tag is available
if (rfid.PICC_ReadCardSerial()) { // NUID has been readed
MFRC522::PICC_Type piccType = rfid.PICC_GetType(rfid.uid.sak);
//Serial.print("RFID/NFC Tag Type: ");
//Serial.println(rfid.PICC_GetTypeName(piccType));
// print NUID in Serial Monitor in the hex format
Serial.print("UID:");
for (int i = 0; i < rfid.uid.size; i++) {
Serial.print(rfid.uid.uidByte[i] < 0x10 ? " 0" : " ");
Serial.print(rfid.uid.uidByte[i], HEX);
}
Serial.println();
rfid.PICC_HaltA(); // halt PICC
rfid.PCD_StopCrypto1(); // stop encryption on PCD
}
}
}
Kode med servo: #
/*
* Created by ArduinoGetStarted.com
*
* This example code is in the public domain
*
* Tutorial page: https://arduinogetstarted.com/tutorials/arduino-rfid-nfc-servo-motor
*/
#include <SPI.h>
#include <MFRC522.h>
#include <Servo.h>
#define SS_PIN 10
#define RST_PIN 9
#define SERVO_PIN A5
MFRC522 rfid(SS_PIN, RST_PIN);
Servo servo;
byte authorizedUID[4] = {0xFF, 0xFF, 0xFF, 0xFF};
int angle = 0; // the current angle of servo motor
void setup() {
Serial.begin(9600);
SPI.begin(); // init SPI bus
rfid.PCD_Init(); // init MFRC522
servo.attach(SERVO_PIN);
servo.write(angle); // rotate servo motor to 0°
Serial.println("Tap RFID/NFC Tag on reader");
}
void loop() {
if (rfid.PICC_IsNewCardPresent()) { // new tag is available
if (rfid.PICC_ReadCardSerial()) { // NUID has been readed
MFRC522::PICC_Type piccType = rfid.PICC_GetType(rfid.uid.sak);
if (rfid.uid.uidByte[0] == authorizedUID[0] &&
rfid.uid.uidByte[1] == authorizedUID[1] &&
rfid.uid.uidByte[2] == authorizedUID[2] &&
rfid.uid.uidByte[3] == authorizedUID[3] ) {
Serial.println("Authorized Tag");
// change angle of servo motor
if (angle == 0)
angle = 90;
else //if(angle == 90)
angle = 0;
// control servo motor arccoding to the angle
servo.write(angle);
Serial.print("Rotate Servo Motor to ");
Serial.print(angle);
Serial.println("°");
} else {
Serial.print("Unauthorized Tag with UID:");
for (int i = 0; i < rfid.uid.size; i++) {
Serial.print(rfid.uid.uidByte[i] < 0x10 ? " 0" : " ");
Serial.print(rfid.uid.uidByte[i], HEX);
}
Serial.println();
}
rfid.PICC_HaltA(); // halt PICC
rfid.PCD_StopCrypto1(); // stop encryption on PCD
}
}
}